
周立功CANFD200U二次开发(基于Python)
1 Python环境搭建
Python我用的版本是3.13,建议使用3.8以上版本,具体环境搭建我这里就不多说了,网上的教程很多。
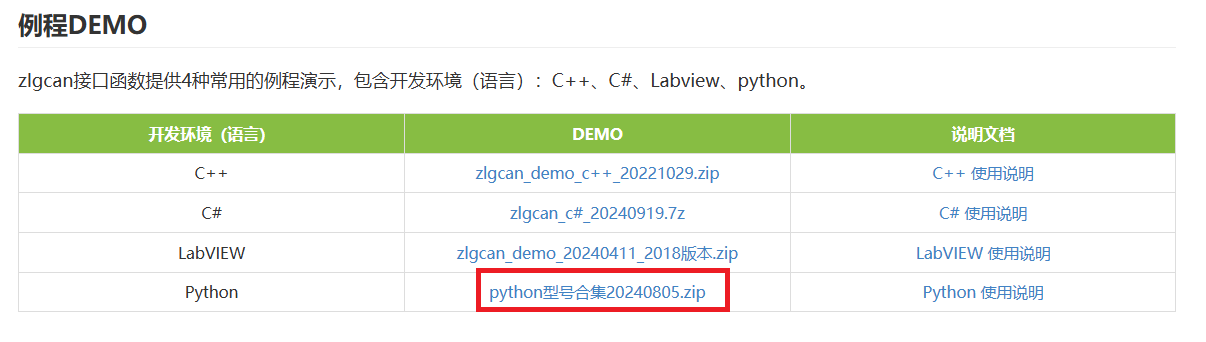
2 下载二次开发所需资料
官网地址:https://manual.zlg.cn/web/#/55

3 demo测试
3.1 示例代码
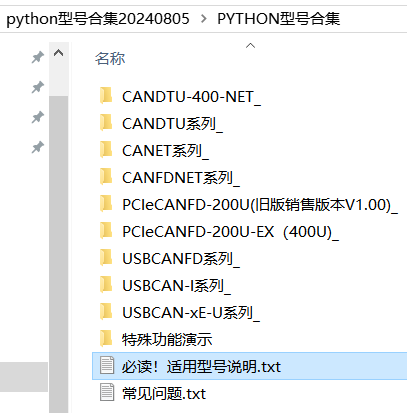
打开上面下载的二次开发资料,找到USBCANFD系列_文件夹,这个示例是匹配CANFD200U的。
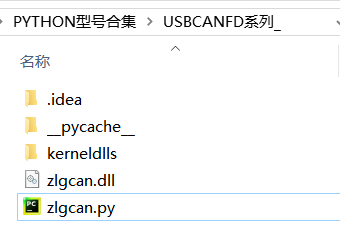
注:kerneldlls和zlgcan.dll是CAN盒运行的基本环境,不能脱离这个单独运行py文件,zlgcan.py是官方示例代码。
若是其他型号的CAN盒,可以查看里面有个型号的说明文档。
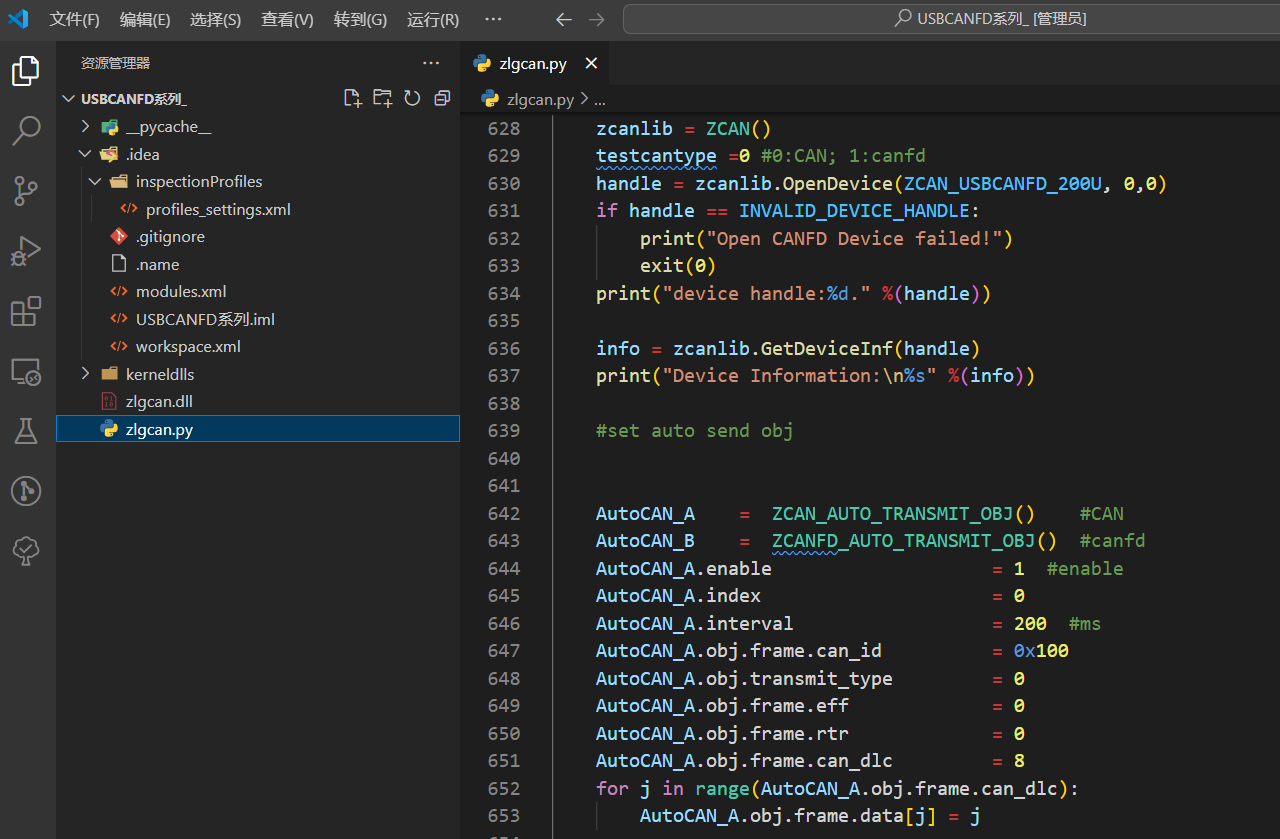
CANFD200U官方示例代码如下:
zlgcan.py:
# -*- coding:utf-8 -*-
# zlgcan.py
#
# ~~~~~~~~~~~~
#
# ZLGCAN API
#
# ~~~~~~~~~~~~
#
# ------------------------------------------------------------------
# Language: Python 2.7, 3.6
# ------------------------------------------------------------------
#
from ctypes import *
import platform
import threading
import time
ZCAN_DEVICE_TYPE = c_uint
INVALID_DEVICE_HANDLE = 0
INVALID_CHANNEL_HANDLE = 0
'''
Device Type
'''
ZCAN_PCI5121 = ZCAN_DEVICE_TYPE(1)
ZCAN_PCI9810 = ZCAN_DEVICE_TYPE(2)
ZCAN_USBCAN1 = ZCAN_DEVICE_TYPE(3)
ZCAN_USBCAN2 = ZCAN_DEVICE_TYPE(4)
ZCAN_PCI9820 = ZCAN_DEVICE_TYPE(5)
ZCAN_CAN232 = ZCAN_DEVICE_TYPE(6)
ZCAN_PCI5110 = ZCAN_DEVICE_TYPE(7)
ZCAN_CANLITE = ZCAN_DEVICE_TYPE(8)
ZCAN_ISA9620 = ZCAN_DEVICE_TYPE(9)
ZCAN_ISA5420 = ZCAN_DEVICE_TYPE(10)
ZCAN_PC104CAN = ZCAN_DEVICE_TYPE(11)
ZCAN_CANETUDP = ZCAN_DEVICE_TYPE(12)
ZCAN_CANETE = ZCAN_DEVICE_TYPE(12)
ZCAN_DNP9810 = ZCAN_DEVICE_TYPE(13)
ZCAN_PCI9840 = ZCAN_DEVICE_TYPE(14)
ZCAN_PC104CAN2 = ZCAN_DEVICE_TYPE(15)
ZCAN_PCI9820I = ZCAN_DEVICE_TYPE(16)
ZCAN_CANETTCP = ZCAN_DEVICE_TYPE(17)
ZCAN_PCIE_9220 = ZCAN_DEVICE_TYPE(18)
ZCAN_PCI5010U = ZCAN_DEVICE_TYPE(19)
ZCAN_USBCAN_E_U = ZCAN_DEVICE_TYPE(20)
ZCAN_USBCAN_2E_U = ZCAN_DEVICE_TYPE(21)
ZCAN_PCI5020U = ZCAN_DEVICE_TYPE(22)
ZCAN_EG20T_CAN = ZCAN_DEVICE_TYPE(23)
ZCAN_PCIE9221 = ZCAN_DEVICE_TYPE(24)
ZCAN_WIFICAN_TCP = ZCAN_DEVICE_TYPE(25)
ZCAN_WIFICAN_UDP = ZCAN_DEVICE_TYPE(26)
ZCAN_PCIe9120 = ZCAN_DEVICE_TYPE(27)
ZCAN_PCIe9110 = ZCAN_DEVICE_TYPE(28)
ZCAN_PCIe9140 = ZCAN_DEVICE_TYPE(29)
ZCAN_USBCAN_4E_U = ZCAN_DEVICE_TYPE(31)
ZCAN_CANDTU_200UR = ZCAN_DEVICE_TYPE(32)
ZCAN_CANDTU_MINI = ZCAN_DEVICE_TYPE(33)
ZCAN_USBCAN_8E_U = ZCAN_DEVICE_TYPE(34)
ZCAN_CANREPLAY = ZCAN_DEVICE_TYPE(35)
ZCAN_CANDTU_NET = ZCAN_DEVICE_TYPE(36)
ZCAN_CANDTU_100UR = ZCAN_DEVICE_TYPE(37)
ZCAN_PCIE_CANFD_100U = ZCAN_DEVICE_TYPE(38)
ZCAN_PCIE_CANFD_200U = ZCAN_DEVICE_TYPE(39)
ZCAN_PCIE_CANFD_400U = ZCAN_DEVICE_TYPE(40)
ZCAN_USBCANFD_200U = ZCAN_DEVICE_TYPE(41)
ZCAN_USBCANFD_100U = ZCAN_DEVICE_TYPE(42)
ZCAN_USBCANFD_MINI = ZCAN_DEVICE_TYPE(43)
ZCAN_CANFDCOM_100IE = ZCAN_DEVICE_TYPE(44)
ZCAN_CANSCOPE = ZCAN_DEVICE_TYPE(45)
ZCAN_CLOUD = ZCAN_DEVICE_TYPE(46)
ZCAN_CANDTU_NET_400 = ZCAN_DEVICE_TYPE(47)
ZCAN_CANFDNET_200U_TCP = ZCAN_DEVICE_TYPE(48)
ZCAN_CANFDNET_200U_UDP = ZCAN_DEVICE_TYPE(49)
ZCAN_CANFDWIFI_100U_TCP = ZCAN_DEVICE_TYPE(50)
ZCAN_CANFDWIFI_100U_UDP = ZCAN_DEVICE_TYPE(51)
ZCAN_CANFDNET_400U_TCP = ZCAN_DEVICE_TYPE(52)
ZCAN_CANFDNET_400U_UDP = ZCAN_DEVICE_TYPE(53)
ZCAN_CANFDBLUE_200U = ZCAN_DEVICE_TYPE(54)
ZCAN_CANFDNET_100U_TCP = ZCAN_DEVICE_TYPE(55)
ZCAN_CANFDNET_100U_UDP = ZCAN_DEVICE_TYPE(56)
ZCAN_CANFDNET_800U_TCP = ZCAN_DEVICE_TYPE(57)
ZCAN_CANFDNET_800U_UDP = ZCAN_DEVICE_TYPE(58)
ZCAN_USBCANFD_800U = ZCAN_DEVICE_TYPE(59)
ZCAN_PCIE_CANFD_100U_EX = ZCAN_DEVICE_TYPE(60)
ZCAN_PCIE_CANFD_400U_EX = ZCAN_DEVICE_TYPE(61)
ZCAN_PCIE_CANFD_200U_MINI = ZCAN_DEVICE_TYPE(62)
ZCAN_PCIE_CANFD_200U_M2 = ZCAN_DEVICE_TYPE(63)
ZCAN_PCIE_CANFD_200U_EX = ZCAN_DEVICE_TYPE(62)
ZCAN_CANFDDTU_400_TCP = ZCAN_DEVICE_TYPE(64)
ZCAN_CANFDDTU_400_UDP = ZCAN_DEVICE_TYPE(65)
ZCAN_CANFDWIFI_200U_TCP = ZCAN_DEVICE_TYPE(66)
ZCAN_CANFDWIFI_200U_UDP = ZCAN_DEVICE_TYPE(67)
ZCAN_CANFDDTU_800ER_TCP = ZCAN_DEVICE_TYPE(68)
ZCAN_CANFDDTU_800ER_UDP = ZCAN_DEVICE_TYPE(69)
ZCAN_CANFDDTU_800EWGR_TCP = ZCAN_DEVICE_TYPE(70)
ZCAN_CANFDDTU_800EWGR_UDP = ZCAN_DEVICE_TYPE(71)
ZCAN_CANFDDTU_600EWGR_TCP = ZCAN_DEVICE_TYPE(72)
ZCAN_CANFDDTU_600EWGR_UDP = ZCAN_DEVICE_TYPE(73)
ZCAN_CANFDDTU_CASCADE_TCP = ZCAN_DEVICE_TYPE(74)
ZCAN_CANFDDTU_CASCADE_UDP = ZCAN_DEVICE_TYPE(75)
ZCAN_USBCANFD_400U = ZCAN_DEVICE_TYPE(76)
ZCAN_CANFDDTU_200U = ZCAN_DEVICE_TYPE(77)
ZCAN_CANFDBRIDGE_PLUS = ZCAN_DEVICE_TYPE(80)
ZCAN_CANFDDTU_300U = ZCAN_DEVICE_TYPE(81)
ZCAN_VIRTUAL_DEVICE = ZCAN_DEVICE_TYPE(99)
'''
Interface return status
'''
ZCAN_STATUS_ERR = 0
ZCAN_STATUS_OK = 1
ZCAN_STATUS_ONLINE = 2
ZCAN_STATUS_OFFLINE = 3
ZCAN_STATUS_UNSUPPORTED = 4
'''
CAN type
'''
ZCAN_TYPE_CAN = c_uint(0)
ZCAN_TYPE_CANFD = c_uint(1)
def input_thread():
input()
'''
Device information
'''
class ZCAN_DEVICE_INFO(Structure):
_fields_ = [("hw_Version", c_ushort),
("fw_Version", c_ushort),
("dr_Version", c_ushort),
("in_Version", c_ushort),
("irq_Num", c_ushort),
("can_Num", c_ubyte),
("str_Serial_Num", c_ubyte * 20),
("str_hw_Type", c_ubyte * 40),
("reserved", c_ushort * 4)]
def __str__(self):
return "Hardware Version:%s\nFirmware Version:%s\nDriver Interface:%s\nInterface Interface:%s\nInterrupt Number:%d\nCAN Number:%d\nSerial:%s\nHardware Type:%s\n" %(
self.hw_version, self.fw_version, self.dr_version, self.in_version, self.irq_num, self.can_num, self.serial, self.hw_type)
def _version(self, version):
return ("V%02x.%02x" if version // 0xFF >= 9 else "V%d.%02x") % (version // 0xFF, version & 0xFF)
@property
def hw_version(self):
return self._version(self.hw_Version)
@property
def fw_version(self):
return self._version(self.fw_Version)
@property
def dr_version(self):
return self._version(self.dr_Version)
@property
def in_version(self):
return self._version(self.in_Version)
@property
def irq_num(self):
return self.irq_Num
@property
def can_num(self):
return self.can_Num
@property
def serial(self):
serial = ''
for c in self.str_Serial_Num:
if c > 0:
serial += chr(c)
else:
break
return serial
@property
def hw_type(self):
hw_type = ''
for c in self.str_hw_Type:
if c > 0:
hw_type += chr(c)
else:
break
return hw_type
class _ZCAN_CHANNEL_CAN_INIT_CONFIG(Structure):
_fields_ = [("acc_code", c_uint),
("acc_mask", c_uint),
("reserved", c_uint),
("filter", c_ubyte),
("timing0", c_ubyte),
("timing1", c_ubyte),
("mode", c_ubyte)]
class _ZCAN_CHANNEL_CANFD_INIT_CONFIG(Structure):
_fields_ = [("acc_code", c_uint),
("acc_mask", c_uint),
("abit_timing", c_uint),
("dbit_timing", c_uint),
("brp", c_uint),
("filter", c_ubyte),
("mode", c_ubyte),
("pad", c_ushort),
("reserved", c_uint)]
class _ZCAN_CHANNEL_INIT_CONFIG(Union):
_fields_ = [("can", _ZCAN_CHANNEL_CAN_INIT_CONFIG), ("canfd", _ZCAN_CHANNEL_CANFD_INIT_CONFIG)]
class ZCAN_CHANNEL_INIT_CONFIG(Structure):
_fields_ = [("can_type", c_uint),
("config", _ZCAN_CHANNEL_INIT_CONFIG)]
class ZCAN_CHANNEL_ERR_INFO(Structure):
_fields_ = [("error_code", c_uint),
("passive_ErrData", c_ubyte * 3),
("arLost_ErrData", c_ubyte)]
class ZCAN_CHANNEL_STATUS(Structure):
_fields_ = [("errInterrupt", c_ubyte),
("regMode", c_ubyte),
("regStatus", c_ubyte),
("regALCapture", c_ubyte),
("regECCapture", c_ubyte),
("regEWLimit", c_ubyte),
("regRECounter", c_ubyte),
("regTECounter", c_ubyte),
("Reserved", c_ubyte)]
class ZCAN_CAN_FRAME(Structure):
_fields_ = [("can_id", c_uint, 29),
("err", c_uint, 1),
("rtr", c_uint, 1),
("eff", c_uint, 1),
("can_dlc", c_ubyte),
("__pad", c_ubyte),
("__res0", c_ubyte),
("__res1", c_ubyte),
("data", c_ubyte * 8)]
class ZCAN_CANFD_FRAME(Structure):
_fields_ = [("can_id", c_uint, 29),
("err", c_uint, 1),
("rtr", c_uint, 1),
("eff", c_uint, 1),
("len", c_ubyte),
("brs", c_ubyte, 1),
("esi", c_ubyte, 1),
("__pad", c_ubyte, 6),
("__res0", c_ubyte),
("__res1", c_ubyte),
("data", c_ubyte * 64)]
class ZCANdataFlag(Structure):
_pack_ = 1
_fields_= [("frameType",c_uint,2),
("txDelay",c_uint,2),
("transmitType",c_uint,4),
("txEchoRequest",c_uint,1),
("txEchoed",c_uint,1),
("reserved",c_uint,22),
]
class ZCANFDData(Structure): ##表示 CAN/CANFD 帧结构,目前仅作为 ZCANDataObj 结构的成员使用
_pack_ = 1
_fields_= [("timestamp",c_uint64),
("flag",ZCANdataFlag),
("extraData",c_ubyte*4),
("frame",ZCAN_CANFD_FRAME),]
class ZCANDataObj(Structure):
_pack_ = 1
_fields_= [("dataType",c_ubyte),
("chnl",c_ubyte),
("flag",c_ushort),
("extraData",c_ubyte*4),
("zcanfddata",ZCANFDData),##88个字节
("reserved",c_ubyte*4),
]
class ZCAN_Transmit_Data(Structure):
_fields_ = [("frame", ZCAN_CAN_FRAME), ("transmit_type", c_uint)]
class ZCAN_Receive_Data(Structure):
_fields_ = [("frame", ZCAN_CAN_FRAME), ("timestamp", c_ulonglong)]
class ZCAN_TransmitFD_Data(Structure):
_fields_ = [("frame", ZCAN_CANFD_FRAME), ("transmit_type", c_uint)]
class ZCAN_ReceiveFD_Data(Structure):
_fields_ = [("frame", ZCAN_CANFD_FRAME), ("timestamp", c_ulonglong)]
class ZCAN_AUTO_TRANSMIT_OBJ(Structure):
_fields_ = [("enable", c_ushort),
("index", c_ushort),
("interval", c_uint),
("obj", ZCAN_Transmit_Data)]
class ZCANFD_AUTO_TRANSMIT_OBJ(Structure):
_fields_ = [("enable", c_ushort),
("index", c_ushort),
("interval", c_uint),
("obj", ZCAN_TransmitFD_Data)]
class ZCANFD_AUTO_TRANSMIT_OBJ_PARAM(Structure): #auto_send delay
_fields_ = [("indix", c_ushort),
("type", c_ushort),
("value", c_uint)]
class IProperty(Structure):
_fields_ = [("SetValue", c_void_p),
("GetValue", c_void_p),
("GetPropertys", c_void_p)]
class ZCAN(object):
def __init__(self):
if platform.system() == "Windows":
self.__dll = windll.LoadLibrary("./zlgcan.dll")
else:
print("No support now!")
if self.__dll == None:
print("DLL couldn't be loaded!")
def OpenDevice(self, device_type, device_index, reserved):
try:
return self.__dll.ZCAN_OpenDevice(device_type, device_index, reserved)
except:
print("Exception on OpenDevice!")
raise
def CloseDevice(self, device_handle):
try:
return self.__dll.ZCAN_CloseDevice(device_handle)
except:
print("Exception on CloseDevice!")
raise
def GetDeviceInf(self, device_handle):
try:
info = ZCAN_DEVICE_INFO()
ret = self.__dll.ZCAN_GetDeviceInf(device_handle, byref(info))
return info if ret == ZCAN_STATUS_OK else None
except:
print("Exception on ZCAN_GetDeviceInf")
raise
def DeviceOnLine(self, device_handle):
try:
return self.__dll.ZCAN_IsDeviceOnLine(device_handle)
except:
print("Exception on ZCAN_ZCAN_IsDeviceOnLine!")
raise
def InitCAN(self, device_handle, can_index, init_config):
try:
return self.__dll.ZCAN_InitCAN(device_handle, can_index, byref(init_config))
except:
print("Exception on ZCAN_InitCAN!")
raise
def StartCAN(self, chn_handle):
try:
return self.__dll.ZCAN_StartCAN(chn_handle)
except:
print("Exception on ZCAN_StartCAN!")
raise
def ResetCAN(self, chn_handle):
try:
return self.__dll.ZCAN_ResetCAN(chn_handle)
except:
print("Exception on ZCAN_ResetCAN!")
raise
def ClearBuffer(self, chn_handle):
try:
return self.__dll.ZCAN_ClearBuffer(chn_handle)
except:
print("Exception on ZCAN_ClearBuffer!")
raise
def ReadChannelErrInfo(self, chn_handle):
try:
ErrInfo = ZCAN_CHANNEL_ERR_INFO()
ret = self.__dll.ZCAN_ReadChannelErrInfo(chn_handle, byref(ErrInfo))
return ErrInfo if ret == ZCAN_STATUS_OK else None
except:
print("Exception on ZCAN_ReadChannelErrInfo!")
raise
def ReadChannelStatus(self, chn_handle):
try:
status = ZCAN_CHANNEL_STATUS()
ret = self.__dll.ZCAN_ReadChannelStatus(chn_handle, byref(status))
return status if ret == ZCAN_STATUS_OK else None
except:
print("Exception on ZCAN_ReadChannelStatus!")
raise
def GetReceiveNum(self, chn_handle, can_type = ZCAN_TYPE_CAN):
try:
return self.__dll.ZCAN_GetReceiveNum(chn_handle, can_type)
except:
print("Exception on ZCAN_GetReceiveNum!")
raise
def Transmit(self, chn_handle, std_msg, len):
try:
return self.__dll.ZCAN_Transmit(chn_handle, byref(std_msg), len)
except:
print("Exception on ZCAN_Transmit!")
raise
def Receive(self, chn_handle, rcv_num, wait_time = c_int(-1)):
try:
rcv_can_msgs = (ZCAN_Receive_Data * rcv_num)()
ret = self.__dll.ZCAN_Receive(chn_handle, byref(rcv_can_msgs), rcv_num, wait_time)
return rcv_can_msgs, ret
except:
print("Exception on ZCAN_Receive!")
raise
def TransmitFD(self, chn_handle, fd_msg, len):
try:
return self.__dll.ZCAN_TransmitFD(chn_handle, byref(fd_msg), len)
except:
print("Exception on ZCAN_TransmitFD!")
raise
def TransmitData(self,device_handle,msg,len):
try:
return self.__dll.ZCAN_TransmitData(device_handle,byref(msg),len)
except:
print("Exception on ZCAN_TransmitData!")
raise
def ReceiveFD(self, chn_handle, rcv_num, wait_time = c_int(-1)):
try:
rcv_canfd_msgs = (ZCAN_ReceiveFD_Data * rcv_num)()
ret = self.__dll.ZCAN_ReceiveFD(chn_handle, byref(rcv_canfd_msgs), rcv_num, wait_time)
return rcv_canfd_msgs, ret
except:
print("Exception on ZCAN_ReceiveF D!")
raise
def ReceiveData(self,device_handle,rcv_num,wait_time = c_int(-1)):
try:
rcv_can_data_msgs = (ZCANDataObj * rcv_num)()
ret = self.__dll.ZCAN_ReceiveData(device_handle , rcv_can_data_msgs, rcv_num,wait_time)
return rcv_can_data_msgs ,ret
except:
print("Exception on ZCAN_ReceiveData!")
raise
def GetIProperty(self, device_handle):
try:
self.__dll.GetIProperty.restype = POINTER(IProperty)
return self.__dll.GetIProperty(device_handle)
except:
print("Exception on ZCAN_GetIProperty!")
raise
def SetValue(self, iproperty, path, value):
try:
func = CFUNCTYPE(c_uint, c_char_p, c_char_p)(iproperty.contents.SetValue)
return func(c_char_p(path.encode("utf-8")), c_char_p(value.encode("utf-8")))
except:
print("Exception on IProperty SetValue")
raise
def SetValue1(self, iproperty, path, value): #############################
try:
func = CFUNCTYPE(c_uint, c_char_p, c_char_p)(iproperty.contents.SetValue)
return func(c_char_p(path.encode("utf-8")), c_void_p(value))
except:
print("Exception on IProperty SetValue")
raise
def GetValue(self, iproperty, path):
try:
func = CFUNCTYPE(c_char_p, c_char_p)(iproperty.contents.GetValue)
return func(c_char_p(path.encode("utf-8")))
except:
print("Exception on IProperty GetValue")
raise
def ReleaseIProperty(self, iproperty):
try:
return self.__dll.ReleaseIProperty(iproperty)
except:
print("Exception on ZCAN_ReleaseIProperty!")
raise
def ZCAN_SetValue(self,device_handle,path,value):
try:
self.__dll.ZCAN_SetValue.argtypes=[c_void_p,c_char_p,c_void_p]
return self.__dll.ZCAN_SetValue(device_handle,path.encode("utf-8"),value)
except:
print("Exception on ZCAN_SetValue")
raise
def ZCAN_GetValue(self,device_handle,path):
try:
self.__dll.ZCAN_GetValue.argtypes =[c_void_p,c_char_p]
self.__dll.ZCAN_GetValue.restype =c_void_p
return self.__dll.ZCAN_GetValue(device_handle,path.encode("utf-8"))
except:
print("Exception on ZCAN_GetValue")
raise
###############################################################################
'''
USBCANFD-MINI Demo
'''
def canfd_start(zcanlib, device_handle, chn):
ret = zcanlib.ZCAN_SetValue(device_handle, str(chn) + "/canfd_standard", "0".encode("utf-8"))
if ret != ZCAN_STATUS_OK:
print("Set CH%d CANFD standard failed!" %(chn))
ret = zcanlib.ZCAN_SetValue(device_handle, str(chn) + "/initenal_resistance", "1".encode("utf-8"))
if ret != ZCAN_STATUS_OK:
print("Open CH%d resistance failed!" %(chn))
exit(0)
ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/canfd_abit_baud_rate","500000".encode("utf-8")) #设置波特率
ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/canfd_dbit_baud_rate","2000000".encode("utf-8"))
if ret != ZCAN_STATUS_OK:
print("Set CH%d baud failed!" %(chn))
exit(0)
ret = zcanlib.ZCAN_SetValue(device_handle, "0/set_cn","A001".encode("utf-8"))
if ret == ZCAN_STATUS_OK:
t = zcanlib.ZCAN_GetValue(device_handle, "0/get_cn/1")
print(c_char_p(t).value.decode("utf-8"))
chn_init_cfg = ZCAN_CHANNEL_INIT_CONFIG()
chn_init_cfg.can_type = ZCAN_TYPE_CANFD
chn_init_cfg.config.canfd.mode = 0
chn_handle = zcanlib.InitCAN(device_handle, chn, chn_init_cfg)
if chn_handle ==0:
print("initCAN failed!" %(chn))
exit(0)
###SET filter
ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/filter_clear","0".encode("utf-8"))
if ret != ZCAN_STATUS_OK:
print("Set CH%d filter_clear failed!" %(chn))
exit(0)
ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/filter_mode","0".encode("utf-8")) #标准帧滤波
if ret != ZCAN_STATUS_OK:
print("Set CH%d filter_mode failed!" %(chn))
exit(0)
ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/filter_start","0".encode("utf-8"))
if ret != ZCAN_STATUS_OK:
print("Set CH%d filter_start failed!" %(chn))
exit(0)
ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/filter_end","0x7FF".encode("utf-8"))
if ret != ZCAN_STATUS_OK:
print("Set CH%d filter_end failed!" %(chn))
exit(0)
ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/filter_mode","1".encode("utf-8")) #扩展帧滤波
if ret != ZCAN_STATUS_OK:
print("Set CH%d filter_mode failed!" %(chn))
exit(0)
ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/filter_start","0".encode("utf-8"))
if ret != ZCAN_STATUS_OK:
print("Set CH%d filter_start failed!" %(chn))
exit(0)
ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/filter_end","0x1FFFFFFF".encode("utf-8"))
if ret != ZCAN_STATUS_OK:
print("Set CH%d filter_end failed!" %(chn))
exit(0)
ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/filter_ack","0".encode("utf-8"))
if ret != ZCAN_STATUS_OK:
print("Set CH%d filter_ack failed!" %(chn))
exit(0)
ret=zcanlib.StartCAN(chn_handle)
if ret != ZCAN_STATUS_OK:
print("startCAN failed!" %(chn))
exit(0)
# ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/set_device_tx_echo","1".encode("utf-8")) #发送回显设置,0-禁用,1-开启
# if ret != ZCAN_STATUS_OK:
# print("Set CH%d set_device_tx_echo failed!" %(chn))
# exit(0)
### Set Auto Transmit
'''
#开启硬件定时发送代码
ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/clear_auto_send","0".encode("utf-8"))
if ret != ZCAN_STATUS_OK:
print("Clear CH%d USBCANFD AutoSend failed!" %(chn))
exit(0)
ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/auto_send",byref(AutoCAN_A)) #添加A can报文定时
ret = zcanlib.ZCAN_SetValue(device_handle, str(chn) + "/auto_send_canfd", byref(AutoCAN_B)) #添加B canfd报文定时
ret = zcanlib.ZCAN_SetValue(device_handle,str(chn)+"/apply_auto_send","0".encode("utf-8"))
if ret != ZCAN_STATUS_OK:
print("Apply CH%d USBCANFD AutoSend failed!" %(chn))
exit(0)
'''
return chn_handle
if __name__ == "__main__":
zcanlib = ZCAN()
testcantype =0 #0:CAN; 1:canfd
handle = zcanlib.OpenDevice(ZCAN_USBCANFD_200U, 0,0)
if handle == INVALID_DEVICE_HANDLE:
print("Open CANFD Device failed!")
exit(0)
print("device handle:%d." %(handle))
info = zcanlib.GetDeviceInf(handle)
print("Device Information:\n%s" %(info))
#set auto send obj
AutoCAN_A = ZCAN_AUTO_TRANSMIT_OBJ() #CAN
AutoCAN_B = ZCANFD_AUTO_TRANSMIT_OBJ() #canfd
AutoCAN_A.enable = 1 #enable
AutoCAN_A.index = 0
AutoCAN_A.interval = 200 #ms
AutoCAN_A.obj.frame.can_id = 0x100
AutoCAN_A.obj.transmit_type = 0
AutoCAN_A.obj.frame.eff = 0
AutoCAN_A.obj.frame.rtr = 0
AutoCAN_A.obj.frame.can_dlc = 8
for j in range(AutoCAN_A.obj.frame.can_dlc):
AutoCAN_A.obj.frame.data[j] = j
AutoCAN_B.enable = 1 #enable
AutoCAN_B.index = 1
AutoCAN_B.interval = 200 #ms
AutoCAN_B.obj.frame.can_id = 0x300
AutoCAN_B.obj.transmit_type = 0
AutoCAN_B.obj.frame.eff = 0
AutoCAN_B.obj.frame.rtr = 0
AutoCAN_B.obj.frame.len = 8
for j in range(AutoCAN_B.obj.frame.len):
AutoCAN_B.obj.frame.data[j] = j
#Start CAN
chn_handle = canfd_start(zcanlib, handle, 0)
print("channel handle:%d." %(chn_handle))
#Send CAN Messages
transmit_num = 10
msgs = (ZCAN_Transmit_Data * transmit_num)()
for i in range(transmit_num):
msgs[i].transmit_type = 0 #0-正常发送,2-自发自收
msgs[i].frame.eff = 0 #0-标准帧,1-扩展帧
msgs[i].frame.rtr = 0 #0-数据帧,1-远程帧
msgs[i].frame.can_id = i
msgs[i].frame.can_dlc = 8
for j in range(msgs[i].frame.can_dlc):
msgs[i].frame.data[j] = j
ret = zcanlib.Transmit(chn_handle, msgs, transmit_num)
print("Tranmit Num: %d." % ret)
#Send CANFD Messages
transmit_canfd_num = 10
canfd_msgs = (ZCAN_TransmitFD_Data * transmit_canfd_num)()
for i in range(transmit_num):
canfd_msgs[i].transmit_type = 0 #0-正常发送,2-自发自收
canfd_msgs[i].frame.eff = 0 #0-标准帧,1-扩展帧
canfd_msgs[i].frame.rtr = 0 #0-数据帧,1-远程帧
canfd_msgs[i].frame.brs = 1 #BRS 加速标志位:0不加速,1加速
canfd_msgs[i].frame.can_id = i
canfd_msgs[i].frame.len = 8
for j in range(canfd_msgs[i].frame.len):
canfd_msgs[i].frame.data[j] = j
ret = zcanlib.TransmitFD(chn_handle, canfd_msgs, transmit_canfd_num)
print("Tranmit CANFD Num: %d." % ret)
thread=threading.Thread(target=input_thread)
thread.start()
#Receive Messages
while True:
rcv_num = zcanlib.GetReceiveNum(chn_handle, ZCAN_TYPE_CAN)
rcv_canfd_num = zcanlib.GetReceiveNum(chn_handle, ZCAN_TYPE_CANFD)
if rcv_num:
rcv_msg, rcv_num = zcanlib.Receive(chn_handle, rcv_num)
for i in range(rcv_num):
print("timestamps:%6fs,type:CAN, %s ,id:%s, dlc:%d, eff:%d, rtr:%d, data:%s" %(
rcv_msg[i].timestamp/1000000,"tx" if (rcv_msg[i].frame.__pad&0x20) else "rx",
hex(rcv_msg[i].frame.can_id), rcv_msg[i].frame.can_dlc,
rcv_msg[i].frame.eff, rcv_msg[i].frame.rtr,
''.join(hex(rcv_msg[i].frame.data[j])+ ' 'for j in range(rcv_msg[i].frame.can_dlc))))
if rcv_canfd_num:
rcv_canfd_msgs, rcv_canfd_num = zcanlib.ReceiveFD(chn_handle, rcv_canfd_num)
for i in range(rcv_canfd_num):
print("timestamp:%6fs,type:canfd, %s ,id:%s, len:%d, eff:%d, rtr:%d, esi:%d, brs: %d, data:%s" %(
rcv_canfd_msgs[i].timestamp/1000000,"tx" if (rcv_canfd_msgs[i].frame.__pad&0x8) else "rx" ,
hex(rcv_canfd_msgs[i].frame.can_id), rcv_canfd_msgs[i].frame.len,
rcv_canfd_msgs[i].frame.eff, rcv_canfd_msgs[i].frame.rtr,
rcv_canfd_msgs[i].frame.esi, rcv_canfd_msgs[i].frame.brs,
''.join(hex(rcv_canfd_msgs[i].frame.data[j]) + ' ' for j in range(rcv_canfd_msgs[i].frame.len))))
if thread.is_alive() == False:
break
#Close CAN
ret=zcanlib.ResetCAN(chn_handle)
if ret==1:
print("ResetCAN success! ")
#Close Device
ret=zcanlib.CloseDevice(handle)
if ret==1:
print("CloseDevice success! ")
3.2 运行结果
接上CAN盒,运行zlgcan.py。
注:我这里是用VScode跑的,直接用Python自带IDE也行
运行结果如下:
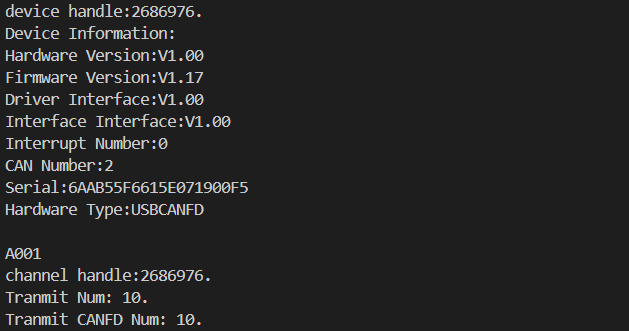
如果像上述log一样,能连接上CAN盒,那环境应该就没有问题了。
4 编程开发
1、在同一目录下,把kerneldlls、zlgcan.dll和zlgcan.py放一起,然后新建一个py文件用来作为你的主程序。
2、修改zlgcan.py文件,把里面的main()函数删掉或者注释掉.
3、添加主程序。
注:我这里还是以官方demo为例。区别在于我这里使用了from zlgcan import *,用来调用zlgcan.py里面的函数,这样的话就把上层应用和CAN盒底层的库分离开来,不然代码看得很乱。
from zlgcan import *
if __name__ == "__main__":
zcanlib = ZCAN()
testcantype =0 #0:CAN; 1:canfd
handle = zcanlib.OpenDevice(ZCAN_USBCANFD_200U, 0,0)
if handle == INVALID_DEVICE_HANDLE:
print("Open CANFD Device failed!")
exit(0)
print("device handle:%d." %(handle))
info = zcanlib.GetDeviceInf(handle)
print("Device Information:\n%s" %(info))
#set auto send obj
AutoCAN_A = ZCAN_AUTO_TRANSMIT_OBJ() #CAN
AutoCAN_B = ZCANFD_AUTO_TRANSMIT_OBJ() #canfd
AutoCAN_A.enable = 1 #enable
AutoCAN_A.index = 0
AutoCAN_A.interval = 200 #ms
AutoCAN_A.obj.frame.can_id = 0x100
AutoCAN_A.obj.transmit_type = 0
AutoCAN_A.obj.frame.eff = 0
AutoCAN_A.obj.frame.rtr = 0
AutoCAN_A.obj.frame.can_dlc = 8
for j in range(AutoCAN_A.obj.frame.can_dlc):
AutoCAN_A.obj.frame.data[j] = j
AutoCAN_B.enable = 1 #enable
AutoCAN_B.index = 1
AutoCAN_B.interval = 200 #ms
AutoCAN_B.obj.frame.can_id = 0x300
AutoCAN_B.obj.transmit_type = 0
AutoCAN_B.obj.frame.eff = 0
AutoCAN_B.obj.frame.rtr = 0
AutoCAN_B.obj.frame.len = 8
for j in range(AutoCAN_B.obj.frame.len):
AutoCAN_B.obj.frame.data[j] = j
#Start CAN
chn_handle = canfd_start(zcanlib, handle, 0)
print("channel handle:%d." %(chn_handle))
#Send CAN Messages
transmit_num = 10
msgs = (ZCAN_Transmit_Data * transmit_num)()
for i in range(transmit_num):
msgs[i].transmit_type = 0 #0-正常发送,2-自发自收
msgs[i].frame.eff = 0 #0-标准帧,1-扩展帧
msgs[i].frame.rtr = 0 #0-数据帧,1-远程帧
msgs[i].frame.can_id = i
msgs[i].frame.can_dlc = 8
for j in range(msgs[i].frame.can_dlc):
msgs[i].frame.data[j] = j
ret = zcanlib.Transmit(chn_handle, msgs, transmit_num)
print("Tranmit Num: %d." % ret)
#Send CANFD Messages
transmit_canfd_num = 10
canfd_msgs = (ZCAN_TransmitFD_Data * transmit_canfd_num)()
for i in range(transmit_num):
canfd_msgs[i].transmit_type = 0 #0-正常发送,2-自发自收
canfd_msgs[i].frame.eff = 0 #0-标准帧,1-扩展帧
canfd_msgs[i].frame.rtr = 0 #0-数据帧,1-远程帧
canfd_msgs[i].frame.brs = 1 #BRS 加速标志位:0不加速,1加速
canfd_msgs[i].frame.can_id = i
canfd_msgs[i].frame.len = 8
for j in range(canfd_msgs[i].frame.len):
canfd_msgs[i].frame.data[j] = j
ret = zcanlib.TransmitFD(chn_handle, canfd_msgs, transmit_canfd_num)
print("Tranmit CANFD Num: %d." % ret)
thread=threading.Thread(target=input_thread)
thread.start()
#Receive Messages
while True:
rcv_num = zcanlib.GetReceiveNum(chn_handle, ZCAN_TYPE_CAN)
rcv_canfd_num = zcanlib.GetReceiveNum(chn_handle, ZCAN_TYPE_CANFD)
if rcv_num:
rcv_msg, rcv_num = zcanlib.Receive(chn_handle, rcv_num)
for i in range(rcv_num):
print("timestamps:%6fs,type:CAN, %s ,id:%s, dlc:%d, eff:%d, rtr:%d, data:%s" %(
rcv_msg[i].timestamp/1000000,"tx" if (rcv_msg[i].frame.__pad&0x20) else "rx",
hex(rcv_msg[i].frame.can_id), rcv_msg[i].frame.can_dlc,
rcv_msg[i].frame.eff, rcv_msg[i].frame.rtr,
''.join(hex(rcv_msg[i].frame.data[j])+ ' 'for j in range(rcv_msg[i].frame.can_dlc))))
if rcv_canfd_num:
rcv_canfd_msgs, rcv_canfd_num = zcanlib.ReceiveFD(chn_handle, rcv_canfd_num)
for i in range(rcv_canfd_num):
print("timestamp:%6fs,type:canfd, %s ,id:%s, len:%d, eff:%d, rtr:%d, esi:%d, brs: %d, data:%s" %(
rcv_canfd_msgs[i].timestamp/1000000,"tx" if (rcv_canfd_msgs[i].frame.__pad&0x8) else "rx" ,
hex(rcv_canfd_msgs[i].frame.can_id), rcv_canfd_msgs[i].frame.len,
rcv_canfd_msgs[i].frame.eff, rcv_canfd_msgs[i].frame.rtr,
rcv_canfd_msgs[i].frame.esi, rcv_canfd_msgs[i].frame.brs,
''.join(hex(rcv_canfd_msgs[i].frame.data[j]) + ' ' for j in range(rcv_canfd_msgs[i].frame.len))))
if thread.is_alive() == False:
break
#Close CAN
ret=zcanlib.ResetCAN(chn_handle)
if ret==1:
print("ResetCAN success! ")
#Close Device
ret=zcanlib.CloseDevice(handle)
if ret==1:
print("CloseDevice success! ")
转载自CSDN-专业IT技术社区
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/ShenZhen_zixian/article/details/144060332

