
《博主简介》
小伙伴们好,我是阿旭。
专注于计算机视觉领域,包括目标检测、图像分类、图像分割和目标跟踪等项目开发,提供模型对比实验、答疑辅导等。
《------往期经典推荐------》
二、机器学习实战专栏【链接】,已更新31期,欢迎关注,持续更新中~~
三、深度学习【Pytorch】专栏【链接】
四、【Stable Diffusion绘画系列】专栏【链接】
五、YOLOv8改进专栏【链接】,持续更新中~~
六、YOLO性能对比专栏【链接】,持续更新中~
《------正文------》
目录
基本功能演示
项目视频演示地址:https://www.bilibili.com/video/BV1cPPfz8EYY/
摘要:海洋环境复杂,传统可见光搜救易受昼夜、反光及伪装干扰,导致漏检率高、范围受限,严重制约“黄金救援时间”。本文基于
YOLO26的深度学习框架,通过295张实际场景中无人机红外视角海上搜救人员的相关图片,训练了一个人员检测模型,可对海上人员进行检测,同时进行语音提示。最终基于训练好的模型制作了一款带UI界面的无人机红外视角海上搜救人员检测与语音提示系统,更便于实际应用。该系统是基于python与PyQT5开发的,支持图片、视频以及摄像头进行目标检测,并保存检测结果。本文提供了完整的Python代码和使用教程,给感兴趣的小伙伴参考学习,完整的代码资源文件获取方式见文末。
研究背景
海洋环境复杂多变,海面广阔且常伴有风浪、雾气及光照变化,传统可见光搜救手段极易受昼夜交替、海面反光及目标伪装(如深色衣物与海水颜色相近)的干扰,导致漏检率高、搜索范围受限,严重制约了“黄金救援时间”的利用。基于YOLO深度学习框架研发的无人机红外视角海上搜救人员检测与语音提示系统,创新性地利用红外热成像技术捕捉人体与冷海水之间的显著温差,彻底突破了夜间、低能见度及强反光环境下的视觉瓶颈。该系统不仅能自动精准识别落水人员并实时统计数量,还能通过语音提示即时警报,将“大海捞针”式的盲目搜索转变为智能化的精准定位。这对于提升海上应急救援的全天候作业能力、降低搜救盲区、大幅提高落水者生还率具有不可替代的战略意义和生命价值。
应用场景
夜间及低能见度紧急搜救:在完全无光的夜晚、浓雾弥漫或暴雨天气中,利用红外热成像穿透黑暗与迷雾,精准锁定落水者体温特征,解决可见光相机“致盲”难题,实现24小时不间断高效搜救。
远洋船舶人员落水监测:配合商船或货轮航行,当发生人员意外落水事故时,快速释放无人机进行周边海域扫描,自动计数并语音播报位置,引导船只迅速回转救援,防止目标被海浪吞没。
近海游泳与水上运动安全保障:在滨海浴场、帆船比赛或铁人三项等水域活动中,实时监控水域情况,一旦发现有人体力不支下沉或偏离安全区,立即触发语音警报通知救生员介入,预防溺水事故。
海难事故大规模人员搜寻:在船只倾覆或飞机坠海等重大灾难发生后,面对大量分散的幸存者,系统能快速遍历广阔海域,自动统计幸存人数并区分聚集点,协助指挥中心优化救援力量部署。
非法偷渡与海上执法侦查:应用于海警巡逻,利用红外特征识别夜间试图通过小型船只或泅渡方式非法入境的人员,即使目标刻意隐蔽或关闭灯光,也能被系统发现并计数,提升边防管控效能。
极地或寒冷海域救援:在低温海域,人体与环境的温差更为显著,该系统能更敏锐地捕捉到穿着厚重防寒服或浸泡在冰水中的遇险者,为极地科考或航运提供关键的生命保障支持。
主要工作内容
本文的主要内容包括以下几个方面:
搜集与整理数据集:搜集整理实际场景中无人机红外视角海上人员的相关数据图片,并进行相应的数据标注与处理,为模型训练提供训练数据集;训练模型:基于整理的数据集,根据最前沿的YOLO26目标检测技术训练目标检测模型,实现对需要检测的对象进行有效检测的功能;模型性能评估:对训练出的模型在验证集上进行了充分的结果评估和对比分析,主要目的是为了揭示模型在关键指标(如Precision、Recall、mAP50和mAP50-95等指标)上的表现情况。可视化系统制作:基于训练出的目标检测模型,搭配Pyqt5制作的UI界面,用python开发了一款界面简洁的软件系统,可支持图片、视频以及摄像头检测,同时可以将图片或者视频检测结果进行保存。其目的是为检测系统提供一个用户友好的操作平台,使用户能够便捷、高效地进行检测任务。
软件初始界面如下图所示:

检测结果界面如下:

一、软件核心功能介绍及效果演示
软件主要功能
1. 可用于红外视角下海上搜救中的人员检测,分1个检测类别:['人'];
2. 支持图片、视频及摄像头进行检测,同时支持图片的批量检测;
3. 当检测到有人时,会有相应文字提示,同时会进行语音提示;
4. 界面可实时显示目标位置、目标总数、置信度、用时、检测结果等信息;
5. 支持图片或者视频的检测结果保存;
6. 支持将图片的检测结果保存为csv文件;
界面参数设置说明

置信度阈值:也就是目标检测时的conf参数,只有检测出的目标框置信度大于该值,结果才会显示;
交并比阈值:也就是目标检测时的iou参数,对检测框重叠比例iou大于该阈值的目标框进行过滤【也就是说假如两检测框iou大于该值的话,会过滤掉其中一个,该值越小,重叠框会越少】;
检测结果说明

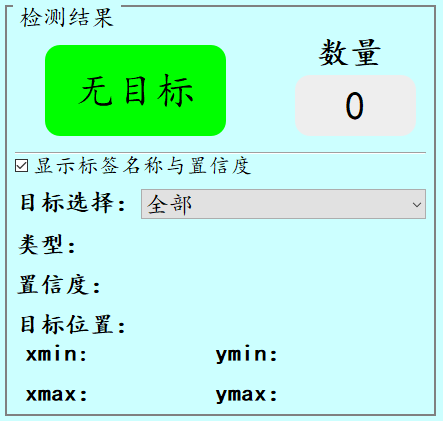
语音提示功能:检测结果区域如检测到目标会显示发现人员,同时会有语音提示。
显示标签名称与置信度:表示是否在检测图片上标签名称与置信度,显示默认勾选,如果不勾选则不会在检测图片上显示标签名称与置信度;
数量:表示画面中检测出的目标数目;
目标选择:可选择单个目标进行位置信息、置信度查看。
目标位置:表示所选择目标的检测框,左上角与右下角的坐标位置。默认显示的是置信度最大的一个目标信息;
主要功能说明
功能视频演示见文章开头,以下是简要的操作描述。
(1)图片检测说明
点击打开图片按钮,选择需要检测的图片,或者点击打开文件夹按钮,选择需要批量检测图片所在的文件夹,操作演示如下:
点击目标下拉框后,可以选定指定目标的结果信息进行显示。
点击保存按钮,会对检测结果进行保存,存储路径为:save_data目录下,同时会将图片检测信息保存csv文件。
注:1.右侧目标位置默认显示置信度最大一个目标位置,可用下拉框进行目标切换。所有检测结果均在左下方表格中显示。
(2)视频检测说明
点击视频按钮,打开选择需要检测的视频,就会自动显示检测结果,再次点击可以关闭视频。
点击保存按钮,会对视频检测结果进行保存,存储路径为:save_data目录下。
(3)摄像头检测说明
点击打开摄像头按钮,可以打开摄像头,可以实时进行检测,再次点击,可关闭摄像头。
(4)保存图片与视频检测说明
点击保存按钮后,会将当前选择的图片【含批量图片】或者视频的检测结果进行保存,对于图片图片检测还会保存检测结果为csv文件,方便进行查看与后续使用。检测的图片与视频结果会存储在save_data目录下。
【注:暂不支持视频文件的检测结果保存为csv文件格式。】
保存的检测结果文件如下:

图片文件保存的csv文件内容如下,包括图片路径、目标在图片中的编号、目标类别、置信度、目标坐标位置。
注:其中坐标位置是代表检测框的左上角与右下角两个点的x、y坐标。

二、模型的训练、评估与推理
1.YOLO26介绍
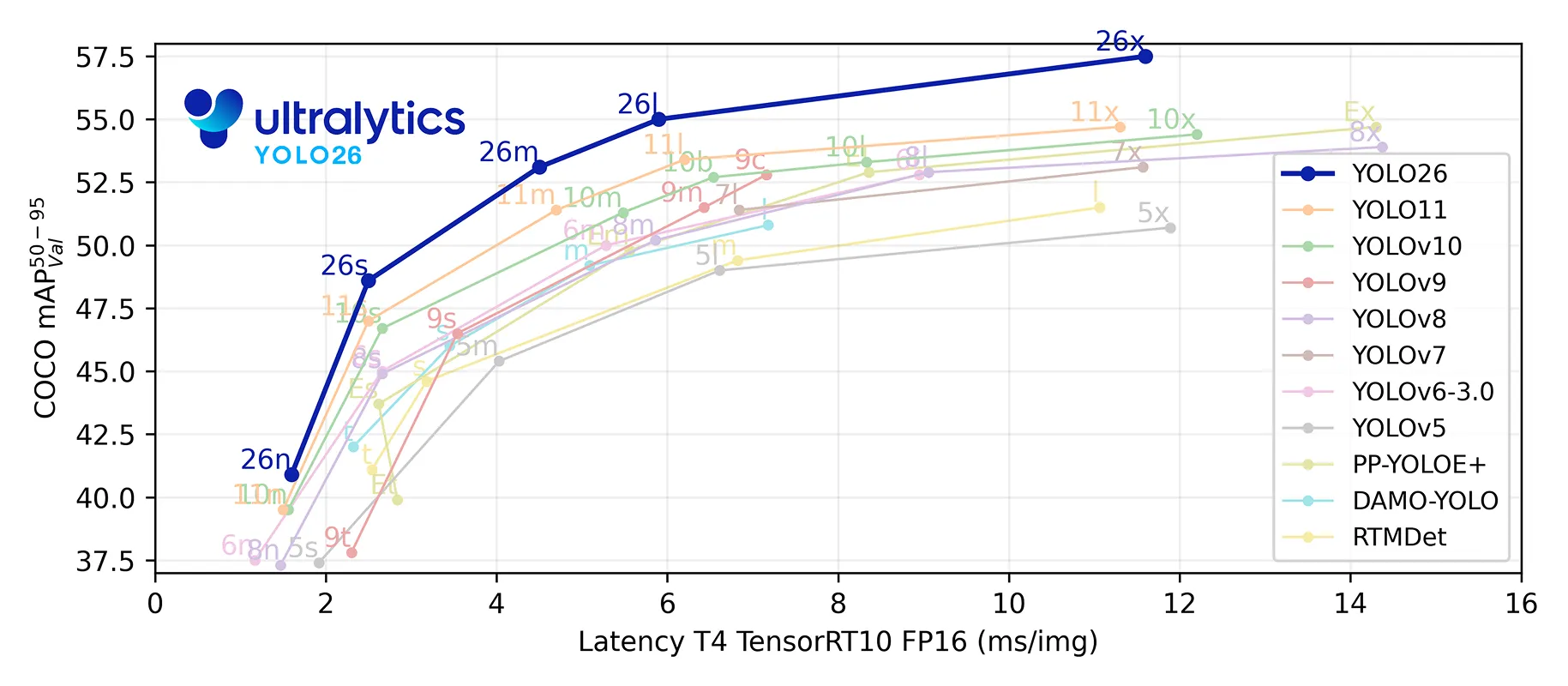
本项目采用的是最新的YOLO26模型。YOLO26 是 Ultralytics 2026 年 1 月推出的新一代计算机视觉模型,主打边缘优先、高效部署。它采用端到端免 NMS 架构,移除 DFL 模块,CPU 推理速度较前代提升 43%;搭配 MuSGD 优化器与 ProgLoss+STAL 损失策略,强化小目标检测能力,支持检测、分割、姿势估计等多任务,可无缝适配树莓派、嵌入式设备等终端,广泛应用于智慧农业、安防监控等领域。
YOLO各版本性能对比:
YOLO26创新点
YOLO26的性能飞跃源于四大核心技术创新,从模型架构到训练机制全面优化:
1. 移除DFL模块,简化预测流程
早期YOLO模型依赖分布焦点损失(DFL)提升边界框精度,但这一模块增加了部署复杂度,且存在固定回归限制。YOLO26彻底移除DFL,不仅简化了边界框预测逻辑,提升了硬件兼容性,还解决了超大目标检测的可靠性问题,让模型在边缘设备上的导出与运行更顺畅。
2. 端到端无NMS推理,降低 latency
传统目标检测需通过非极大值抑制(NMS)进行后处理,过滤重叠预测框——这一步骤会增加延迟、提升部署难度。YOLO26采用原生端到端架构,直接输出最终预测结果,内部自动处理重复预测,彻底省去NMS环节,大幅降低推理延迟与集成风险,完美适配实时边缘场景。
3. ProgLoss+STAL,提升检测精度
- 渐进式损失平衡(ProgLoss):让模型训练过程更稳定,收敛更平滑,减少训练波动
- 小目标感知标签分配(STAL):针对小目标、低可见度目标优化学习机制,解决边缘场景中“难检测”问题
两项技术结合,让YOLO26在复杂场景中仍能保持高可靠检测,尤其适用于物联网、机器人、航拍等小目标密集场景。
4. MuSGD优化器,强化训练稳定性
YOLO26采用全新混合优化器MuSGD,融合传统随机梯度下降(SGD)的强泛化能力与大语言模型(LLM)训练中的先进优化思路。该优化器灵感源自Moonshot AI的Kimi K2,能让模型更快达到高性能水平,同时降低训练不稳定性,尤其在大型复杂数据集训练中表现突出。
数据集准备与训练
本文主要基于YOLO26n模型进行模型训练,训练完成后对模型在验证集上的表现进行全面的性能评估及对比分析。总体流程包括:数据集准备、模型训练、模型评估。
通过网络上搜集关于实际场景中无人机红外视角海上搜救人员的相关图片,并使用Labelimg标注工具对每张图片进行标注,分1个检测类别:['人']。
该数据集一共包含295张图片,其中训练集包含237张图片,验证集包含58张图片。
部分图像及标注如下图所示:


数据集各类别数目分布情况如下:

2.模型训练
准备好数据集后,将图片数据以如下格式放置在项目目录中。在项目目录中新建datasets目录,同时将检测的图片分为训练集与验证集放入Data目录下。

同时我们需要新建一个data.yaml文件,用于存储训练数据的路径及模型需要进行检测的类别。在进行模型训练时,会读取该文件的信息,用于进行模型的训练与验证。data.yaml的具体内容如下:
train: E:\CVProgram\00datasets\Detection\SeaSurfacePerson\datasets\train\images
val: E:\CVProgram\00datasets\Detection\SeaSurfacePerson\datasets\valid\images
nc: 1
names: ['people']
注:train与val后面表示需要训练图片的路径,建议直接写自己文件的绝对路径。
数据准备完成后,通过调用train.py文件进行模型训练,epochs参数用于调整训练的轮数,batch参数用于调整训练的批次大小【根据内存大小调整,最小为1】,optimizer设定的优化器为SGD,训练代码如下:
#coding:utf-8
from ultralytics import YOLO
import matplotlib
matplotlib.use('TkAgg')
# 模型配置文件
model_yaml_path = "ultralytics/cfg/models/26/yolo26.yaml"
#数据集配置文件
data_yaml_path = r'PuddleSeg/data/data/data.yaml'
#预训练模型
pre_model_name = 'yolo26n.pt'
if __name__ == '__main__':
#加载预训练模型
model = YOLO(model_yaml_path).load(pre_model_name)
#训练模型
results = model.train(data=data_yaml_path,
epochs=150,
batch=32,
name='train_26')
模型常用训练超参数参数说明:
YOLO11 模型的训练设置包括训练过程中使用的各种超参数和配置。这些设置会影响模型的性能、速度和准确性。关键的训练设置包括批量大小、学习率、动量和权重衰减。此外,优化器、损失函数和训练数据集组成的选择也会影响训练过程。对这些设置进行仔细的调整和实验对于优化性能至关重要。
以下是一些常用的模型训练参数和说明:
| 参数名 | 默认值 | 说明 |
|---|---|---|
model | None | 指定用于训练的模型文件。接受指向 .pt 预训练模型或 .yaml 配置文件。对于定义模型结构或初始化权重至关重要。 |
data | None | 数据集配置文件的路径(例如 coco8.yaml).该文件包含特定于数据集的参数,包括训练数据和验证数据的路径、类名和类数。 |
epochs | 100 | 训练总轮数。每个epoch代表对整个数据集进行一次完整的训练。调整该值会影响训练时间和模型性能。 |
patience | 100 | 在验证指标没有改善的情况下,提前停止训练所需的epoch数。当性能趋于平稳时停止训练,有助于防止过度拟合。 |
batch | 16 | 批量大小,有三种模式:设置为整数(例如,’ Batch =16 ‘), 60% GPU内存利用率的自动模式(’ Batch =-1 ‘),或指定利用率分数的自动模式(’ Batch =0.70 ')。 |
imgsz | 640 | 用于训练的目标图像尺寸。所有图像在输入模型前都会被调整到这一尺寸。影响模型精度和计算复杂度。 |
device | None | 指定用于训练的计算设备:单个 GPU (device=0)、多个 GPU (device=0,1)、CPU (device=cpu),或苹果芯片的 MPS (device=mps). |
workers | 8 | 加载数据的工作线程数(每 RANK 多 GPU 训练)。影响数据预处理和输入模型的速度,尤其适用于多 GPU 设置。 |
name | None | 训练运行的名称。用于在项目文件夹内创建一个子目录,用于存储训练日志和输出结果。 |
pretrained | True | 决定是否从预处理模型开始训练。可以是布尔值,也可以是加载权重的特定模型的字符串路径。提高训练效率和模型性能。 |
optimizer | 'auto' | 为训练模型选择优化器。选项包括 SGD, Adam, AdamW, NAdam, RAdam, RMSProp 等,或 auto 用于根据模型配置进行自动选择。影响收敛速度和稳定性 |
lr0 | 0.01 | 初始学习率(即 SGD=1E-2, Adam=1E-3) .调整这个值对优化过程至关重要,会影响模型权重的更新速度。 |
lrf | 0.01 | 最终学习率占初始学习率的百分比 = (lr0 * lrf),与调度程序结合使用,随着时间的推移调整学习率。 |
3. 训练结果评估
在深度学习中,我们通常用损失函数下降的曲线来观察模型训练的情况。YOLOv11在训练时主要包含三个方面的损失:定位损失(box_loss)、分类损失(cls_loss)和动态特征损失(dfl_loss),在训练结束后,可以在runs/目录下找到训练过程及结果文件,如下所示:

各损失函数作用说明:
定位损失box_loss:预测框与标定框之间的误差(GIoU),越小定位得越准;
分类损失cls_loss:计算锚框与对应的标定分类是否正确,越小分类得越准;
动态特征损失(dfl_loss):DFLLoss是一种用于回归预测框与目标框之间距离的损失函数。在计算损失时,目标框需要缩放到特征图尺度,即除以相应的stride,并与预测的边界框计算Ciou Loss,同时与预测的anchors中心点到各边的距离计算回归DFLLoss。
本文训练结果如下:

我们通常用PR曲线来体现精确率和召回率的关系,本文训练结果的PR曲线如下。mAP表示Precision和Recall作为两轴作图后围成的面积,m表示平均,@后面的数表示判定iou为正负样本的阈值。[email protected]:表示阈值大于0.5的平均mAP,可以看到本文模型目标检测的[email protected]值为0.989,结果还是十分不错的。

4. 使用模型进行推理
模型训练完成后,我们可以得到一个最佳的训练结果模型best.pt文件,在runs/train/weights目录下。我们可以使用该文件进行后续的推理检测。
图片检测代码如下:
#coding:utf-8
from ultralytics import YOLO
import cv2
# 所需加载的模型目录
path = 'models/best.pt'
# 需要检测的图片地址
img_path = "TestFiles/img-188_png.rf.6408e6372b50a122160d4abb504ec934.jpg"
# 加载预训练模型
model = YOLO(path, task='detect')
# 检测图片
results = model(img_path,conf=0.3)
res = results[0].plot()
# res = cv2.resize(res,dsize=None,fx=0.3,fy=0.3,interpolation=cv2.INTER_LINEAR)
cv2.imshow("Detection Result", res)
cv2.waitKey(0)
执行上述代码后,会将执行的结果直接标注在图片上,结果如下:

更多检测结果示例如下:

四、可视化系统制作
基于上述训练出的目标检测模型,为了给此检测系统提供一个用户友好的操作平台,使用户能够便捷、高效地进行检测任务。博主基于Pyqt5开发了一个可视化的系统界面,通过图形用户界面(GUI),用户可以轻松地在图片、视频和摄像头实时检测之间切换,无需掌握复杂的编程技能即可操作系统。【系统详细展示见第一部分内容】
Pyqt5详细介绍
关于Pyqt5的详细介绍可以参考之前的博客文章:《Python中的Pyqt5详细介绍:基本机构、部件、布局管理、信号与槽、跨平台》,地址:
https://a-xu-ai.blog.csdn.net/article/details/143273797
系统制作
博主基于Pyqt5框架开发了此款无人机红外视角海上搜救人员检测与语音提示系统,即文中第一部分的演示内容,能够很好的支持图片、视频及摄像头进行检测,同时支持检测结果的保存。
通过图形用户界面(GUI),用户可以轻松地在图片、视频和摄像头实时检测之间切换,无需掌握复杂的编程技能即可操作系统。这不仅提升了系统的可用性和用户体验,还使得检测过程更加直观透明,便于结果的实时观察和分析。此外,GUI还可以集成其他功能,如检测结果的保存与导出、检测参数的调整,从而为用户提供一个全面、综合的检测工作环境,促进智能检测技术的广泛应用。

关于该系统涉及到的完整源码、UI界面代码、数据集、训练代码、训练好的模型、测试图片视频等相关文件,均已打包上传,感兴趣的小伙伴可以通过下载链接自行获取。
【获取方式】
关注末尾名片GZH【阿旭算法与机器学习】,号内发送【源码】获取下载方式
本文涉及到的完整全部程序文件:包括python源码、数据集、训练好的结果文件、训练代码、UI源码、测试图片视频等(见下图),获取方式见文末:

注意:该代码基于Python3.9开发,运行界面的主程序为
MainProgram.py,其他测试脚本说明见上图。为确保程序顺利运行,请按照程序运行说明文档txt配置软件运行所需环境。
转载自CSDN-专业IT技术社区
原文链接:https://blog.csdn.net/qq_42589613/article/details/158880501

