
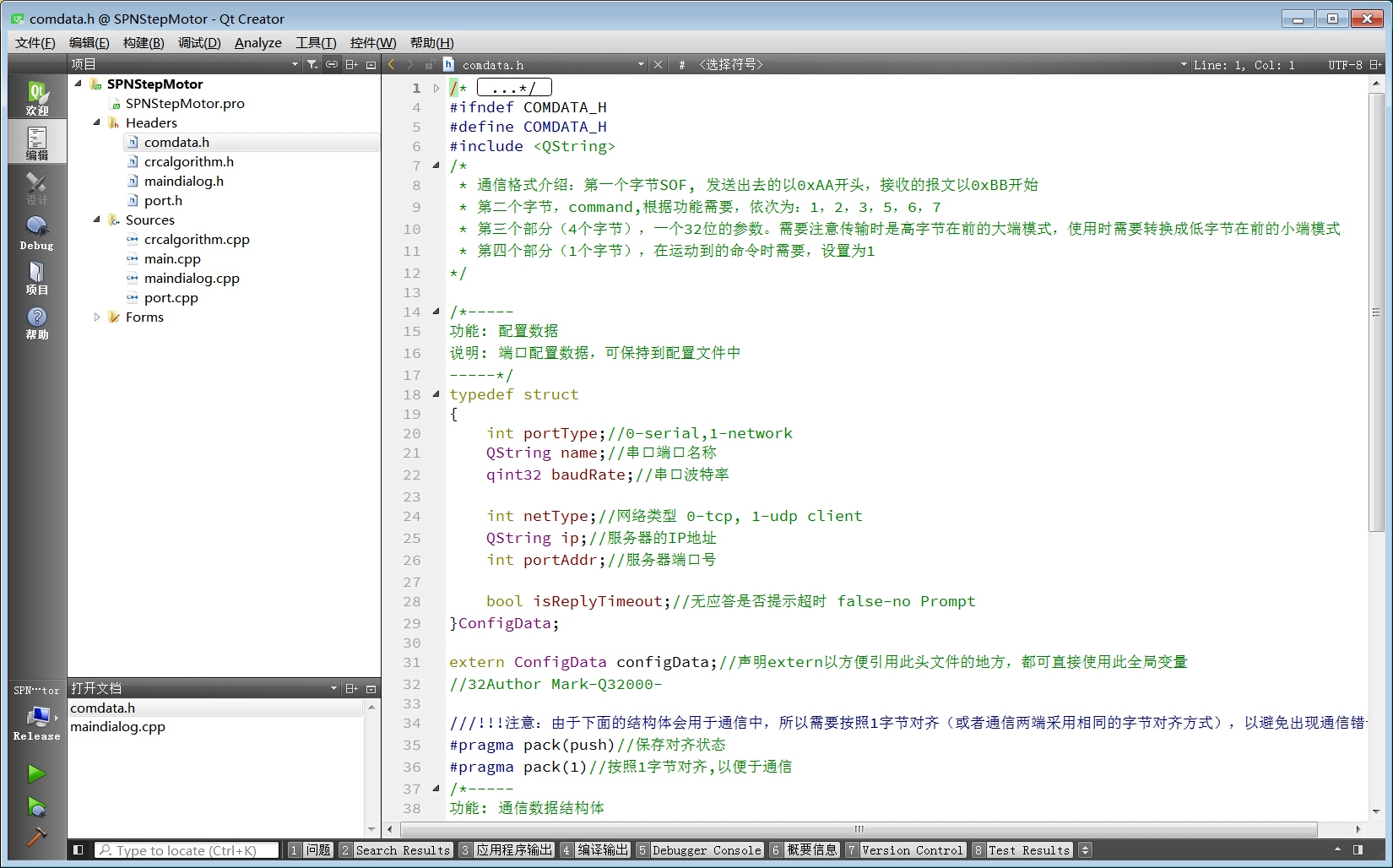
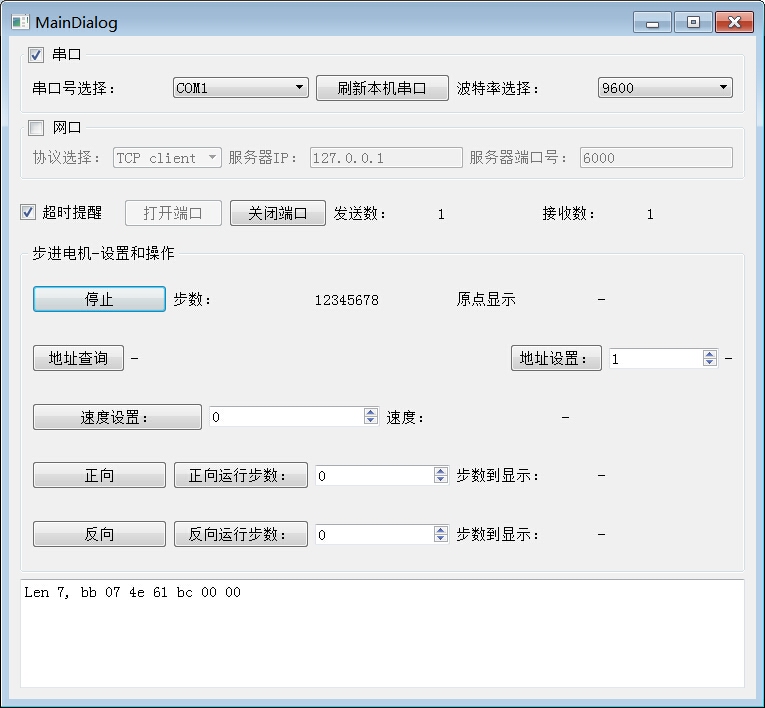
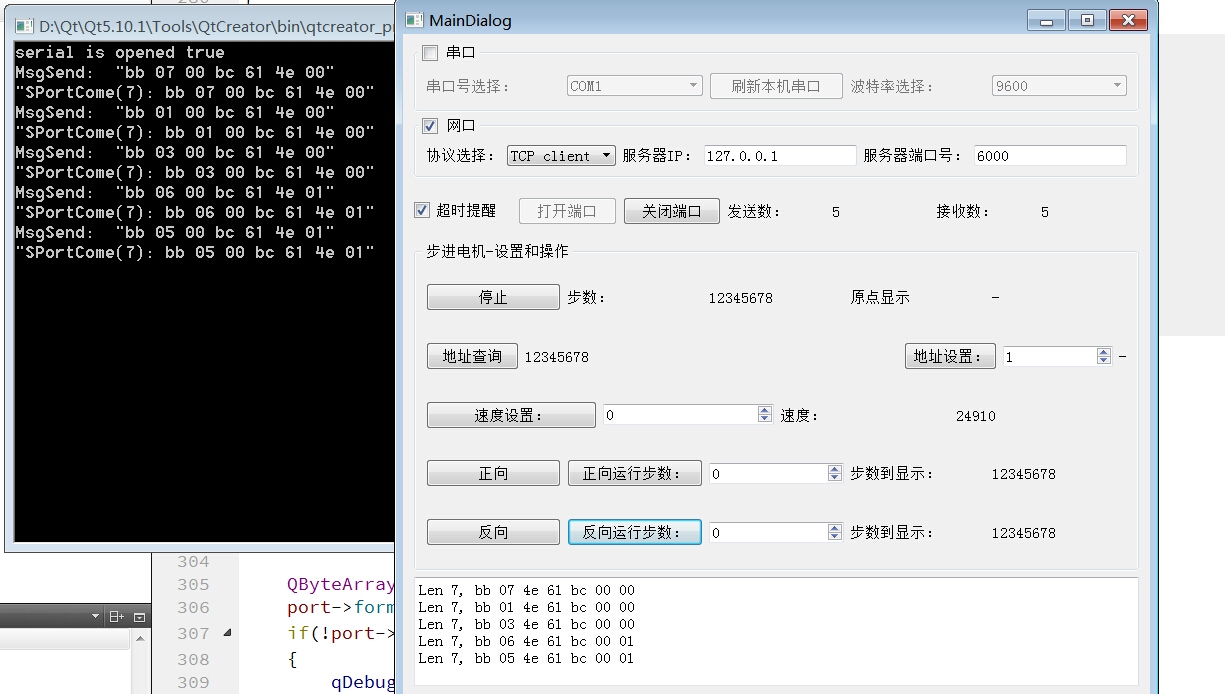
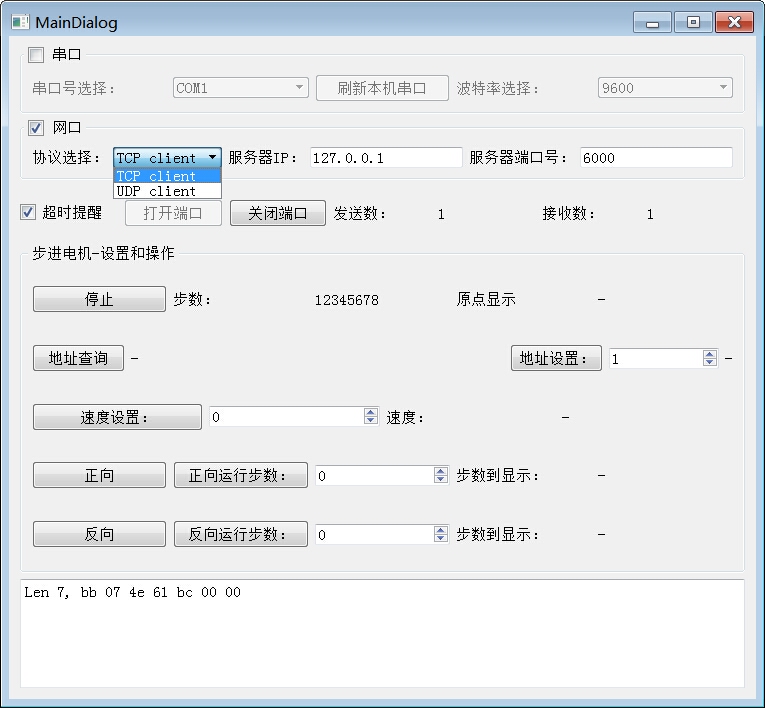
Qt步进电机上位机控制程序源代码Qt跨平台C/C++语言编写 支持串口Tcp网口Udp网络三种端口类型 提供,提供详细注释和人工讲解 1.功能介绍: 可控制步进电机的上位机程序源代码,基于Qt库,采用C/C++语言编写。 支持串口、Tcp网口、Udp网络三种端口类型,带有调试显示窗口,接收数据可实时显示。 带有配置自动保存功能,用户的配置数据会自动存储,带有超时提醒功能,如果不回复则弹框提示。 其中三个端口,采用了类的继承与派生方式编写,对外统一接口,实现多态功能,具备较强的移植性。 2.环境说明: 开发环境是Qt5.10.1,使用Qt自带的QSerialPort,使用网络的Socket编程。 源代码中包含详细注释,使用说明,设计文档等。 请将源码放到纯英文路径下再编译。 3.使用介绍: 可直接运行在可执行程序里的exe文件,操作并了解软件运行流程。 本代码产品特点: 1、尽量贴合实际应用,细节考虑周到。 2、注释完善,讲解详细,还有相关扩展知识点介绍。 3、提供代码设计文档,使用文档,环境配置文档等。 4.子功能模块介绍: 步进电机的地址设置、速度设置、正转反转等控制功能; 网络TcpUdp串口三种通信接口通过继承派生合三为一; 带有接收显示窗口,方便产品调试; 带有超时提醒功能,以防掉线; 带有独立的调试窗口,大大方便调试; 可刷新本机所支持的串口;
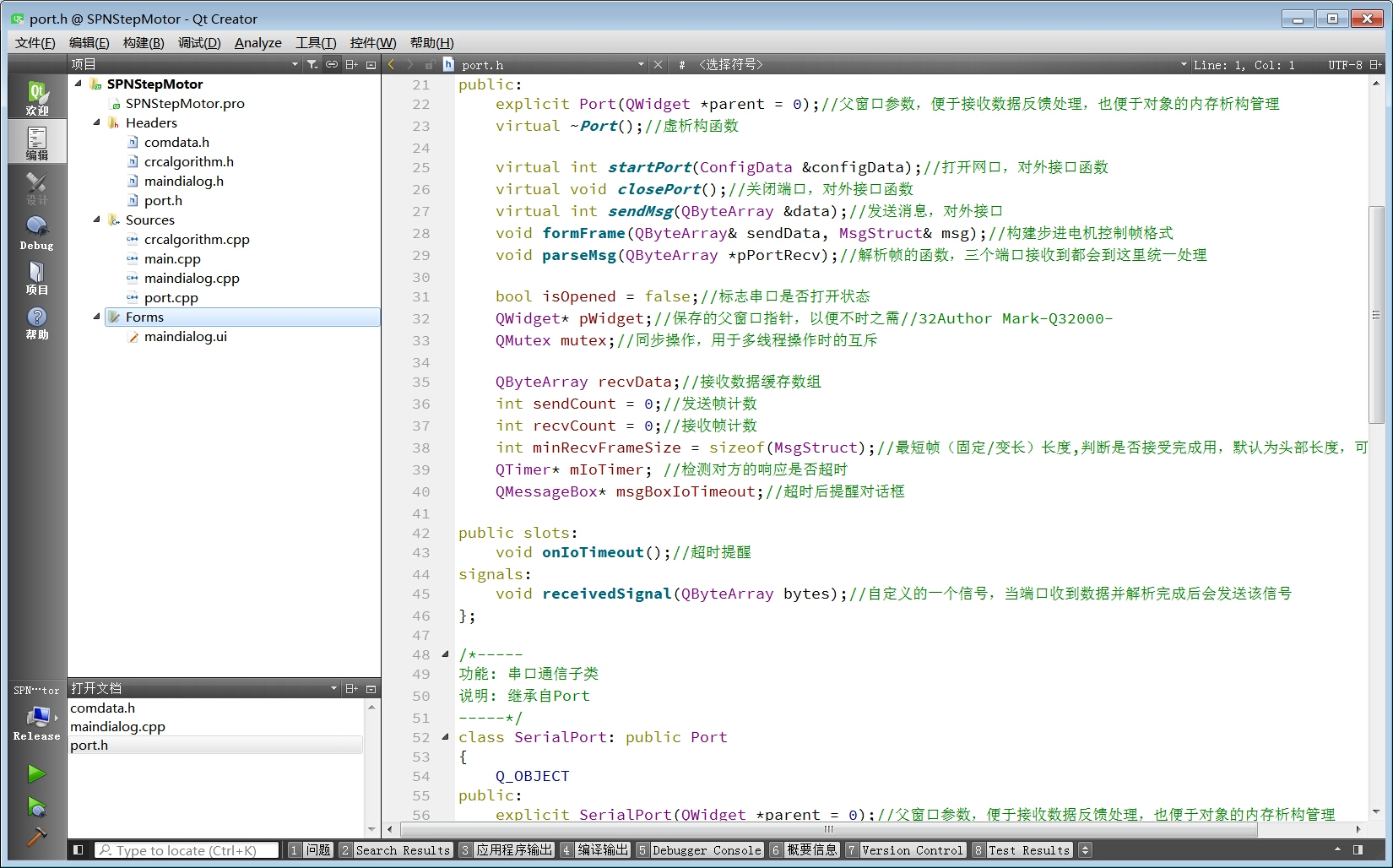
这个步进电机上位机控制程序的设计充分考虑了工业场景的实用性。咱们先看通信模块的设计——作者用C++的继承体系把三种通信方式整合成了统一接口。基类PortBase定义了虚函数sendData()和connectDevice(),看着像这样:
class PortBase : public QObject {
Q_OBJECT
public:
explicit PortBase(QObject *parent = nullptr);
virtual bool connectDevice(const QString ¶m) = 0;
virtual void sendData(const QByteArray &data) = 0;
signals:
void dataReceived(QByteArray);
};派生类比如SerialPort的实现里,重点处理了串口特有的配置项。有意思的是超时检测用QTimer实现得挺巧妙:
void TcpClientPort::checkTimeout() {
if(!m_heartbeatReply) {
QMessageBox::warning(nullptr, "掉线警告", "设备响应超时!");
emit connectionLost();
}
m_heartbeatTimer->start(5000); // 每5秒检测一次心跳
}控制指令生成部分用QByteArray处理二进制协议,比如正反转控制:
void MotorControl::sendMoveCommand(Direction dir) {
QByteArray cmd;
cmd.append(0xAA); // 帧头
cmd.append(m_address);
cmd.append(static_cast<char>(dir));
cmd.append(calculateChecksum(cmd)); // 校验和计算
m_port->sendData(cmd);
}UI部分用Qt的信号槽做解耦,接收数据显示用了自定义的HexView组件。比较贴心的是串口自动刷新功能,用QSerialPortInfo实时获取可用端口:
void MainWindow::refreshSerialPorts() {
ui->comPortCombo->clear();
foreach(const QSerialPortInfo &info, QSerialPortInfo::availablePorts()) {
ui->comPortCombo->addItem(info.portName());
}
}配置保存用QSettings实现得挺简洁,把参数存到注册表里:
void AppConfig::saveSettings() {
QSettings settings("MyCompany", "MotorControl");
settings.setValue("portType", currentPortType);
settings.setValue("lastIP", ipAddress);
settings.setValue("motorSpeed", speedValue);
}调试时发现个细节处理不错——网络通信用了单独的线程池,防止界面卡顿。代码里能看到这样的处理:
void NetworkManager::sendAsync(const QByteArray &data) {
QtConcurrent::run([=](){
// 在子线程执行耗时网络操作
m_socket->write(data);
m_socket->waitForBytesWritten(1000);
});
}整个项目结构清晰,通信、控制、UI三层分离。移植到其他硬件平台时,只需实现新的PortBase派生类即可。测试时建议用VirtualBox装个Linux系统,验证下跨平台特性是否真如说的那么顺畅。
Qt步进电机上位机控制程序源代码Qt跨平台C/C++语言编写 支持串口Tcp网口Udp网络三种端口类型 提供,提供详细注释和人工讲解 1.功能介绍: 可控制步进电机的上位机程序源代码,基于Qt库,采用C/C++语言编写。 支持串口、Tcp网口、Udp网络三种端口类型,带有调试显示窗口,接收数据可实时显示。 带有配置自动保存功能,用户的配置数据会自动存储,带有超时提醒功能,如果不回复则弹框提示。 其中三个端口,采用了类的继承与派生方式编写,对外统一接口,实现多态功能,具备较强的移植性。 2.环境说明: 开发环境是Qt5.10.1,使用Qt自带的QSerialPort,使用网络的Socket编程。 源代码中包含详细注释,使用说明,设计文档等。 请将源码放到纯英文路径下再编译。 3.使用介绍: 可直接运行在可执行程序里的exe文件,操作并了解软件运行流程。 本代码产品特点: 1、尽量贴合实际应用,细节考虑周到。 2、注释完善,讲解详细,还有相关扩展知识点介绍。 3、提供代码设计文档,使用文档,环境配置文档等。 4.子功能模块介绍: 步进电机的地址设置、速度设置、正转反转等控制功能; 网络TcpUdp串口三种通信接口通过继承派生合三为一; 带有接收显示窗口,方便产品调试; 带有超时提醒功能,以防掉线; 带有独立的调试窗口,大大方便调试; 可刷新本机所支持的串口;
转载自CSDN-专业IT技术社区
原文链接:https://blog.csdn.net/OCKHrYfK/article/details/158072423

