
1. 系统概述
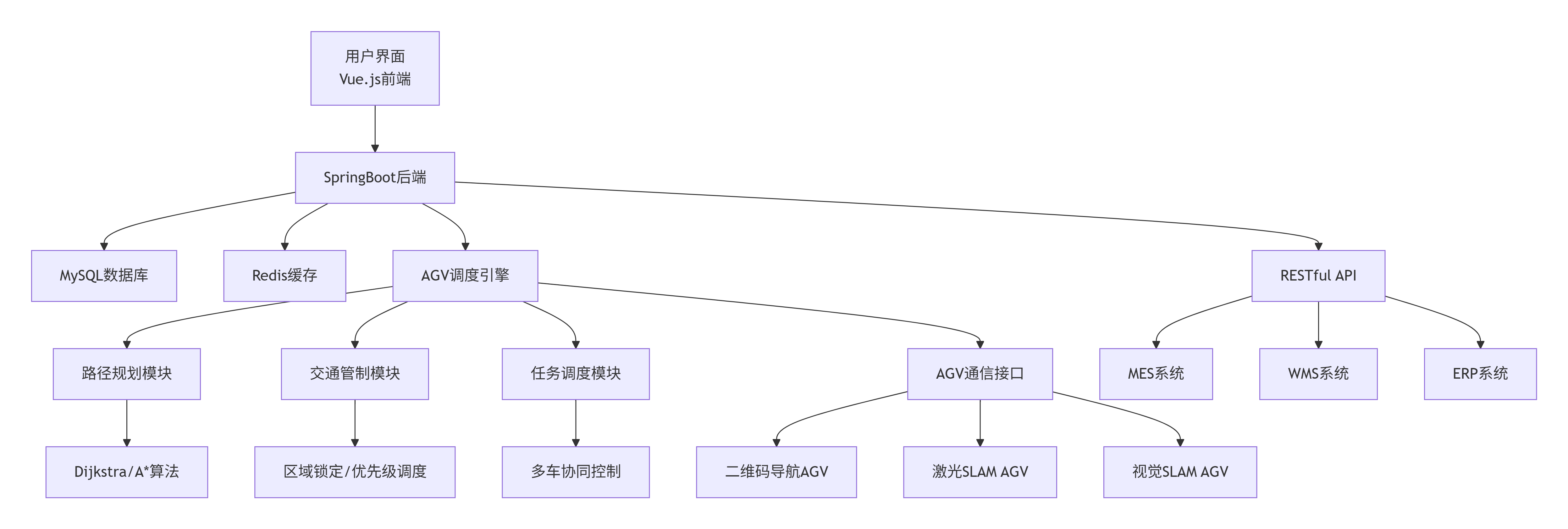
AGV调度系统(RCS)是一个基于B/S架构的智能调度平台,采用前后端分离设计,后端使用Java SpringBoot框架,前端使用Vue.js,数据库为MySQL 5.7,缓存使用Redis。系统支持多种导航方式,包括二维码导航、激光SLAM和视觉SLAM,适用于各类工业自动化场景。
2. 系统架构与技术栈
-
后端:SpringBoot + Java
-
前端:Vue.js
-
数据库:MySQL 5.7
-
缓存:Redis
-
导航方式:二维码、激光SLAM、视觉SLAM
-
部署架构:前后端分离,支持高并发调度
3. 核心功能模块
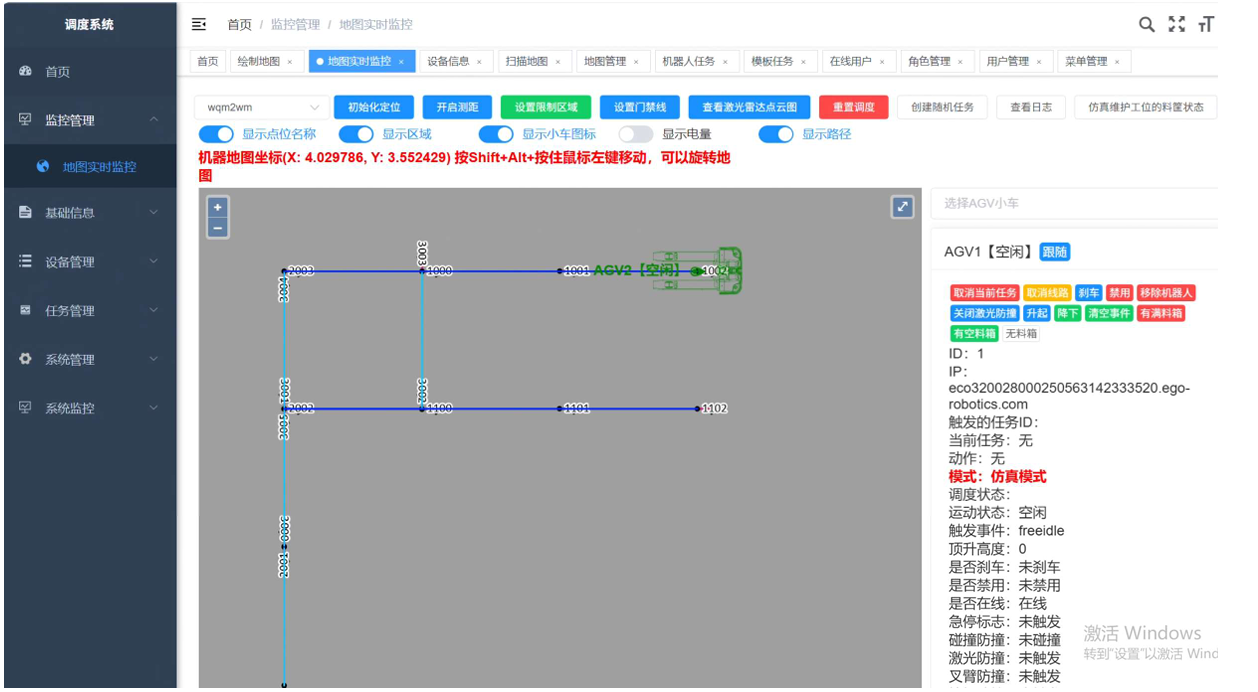
3.1 地图实时监控
-
初始化定位:将AGV绑定到地图指定点位
-
门禁线设置:联动外部自动门、显示/隐藏小车信息
-
点类型编辑:支持充电点、待命点、避让点、工位点、门禁点等多种类型
-
路径导航:双击地图点可调度AGV移动至目标位置
3.2 AGV单车控制面板
-
取消任务、路线
-
控制顶升设备
-
实时显示IP、电量、位置、雷达状态、路径状态等
-
支持速度、高度、角度等参数调整
3.3 地图绘制与管理
-
支持二维码地图与激光地图
-
点与路径编辑(单向/双向路径)
-
多地图管理,支持SLAM建图
-
设备管理:AGV类型、IP、端口、绑定接口等
3.4 任务与接口
-
提供RESTful API,支持与MES、WMS、ERP对接
-
支持多车任务调度
-
实时操作日志,提升协同效率30%
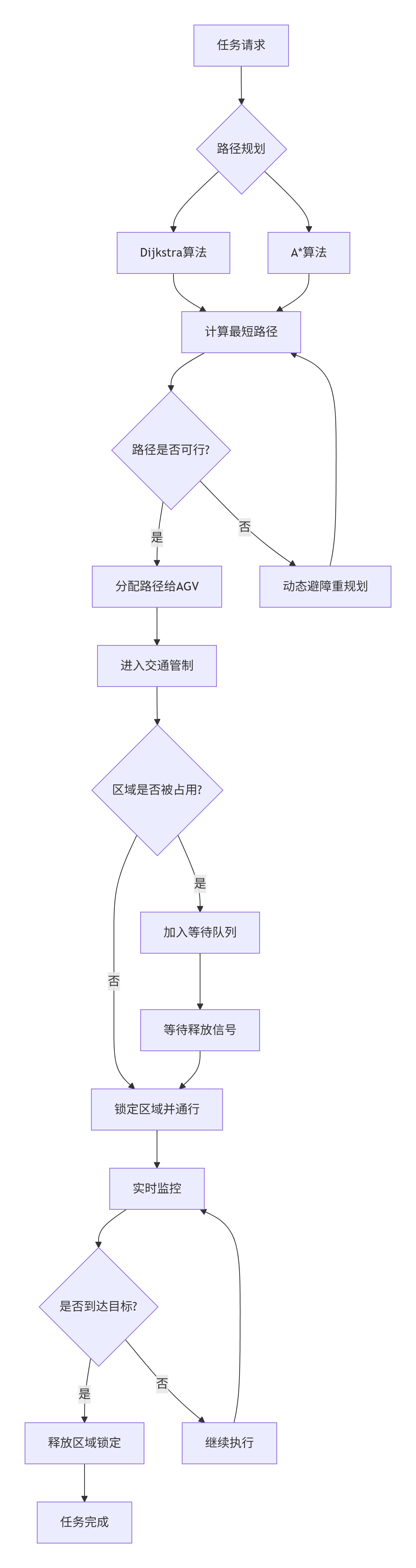
4. 核心调度算法
4.1 最短路径算法(Dijkstra / A*)
系统采用Dijkstra算法或A*算法进行路径规划,确保AGV以最短时间到达目标点。算法基于地图节点与路径权重(如距离、通行时间、优先级)进行计算,支持动态避障与重规划。
4.2 交通管制算法
为避免多AGV碰撞与死锁,系统实现以下交通管制策略:
-
区域锁定机制:AGV进入某区域时锁定该区域,其他AGV需等待
-
优先级调度:根据任务紧急程度、电量等因素动态调整AGV优先级
-
动态避让点:在路径交叉区域设置虚拟避让点,AGV按规则依次通行
-
死锁检测与恢复:实时检测路径死锁,自动调整路径或任务顺序
 5. 适用场景与优势
5. 适用场景与优势
-
适用于仓储物流、智能制造、医疗物资配送等场景
-
支持多导航方式,适应复杂环境
-
高并发调度能力,支持大规模AGV集群
-
开放API接口,易于与现有系统集成
-
可视化监控与实时日志,提升运维效率
6. 总结
AGV调度系统(RCS)是一个功能完善、算法智能的调度平台,通过结合最短路径算法与交通管制策略,实现多AGV高效、安全、协同作业。系统具备良好的扩展性与兼容性,是工业自动化与智能物流领域的重要基础设施。
转载自CSDN-专业IT技术社区
原文链接:https://blog.csdn.net/a602089974/article/details/155803198

